
利用鸿蒙Hispark WIFI IOT 套件控制大疆TELLO 无人机

第一步:查看无人机通信协议:

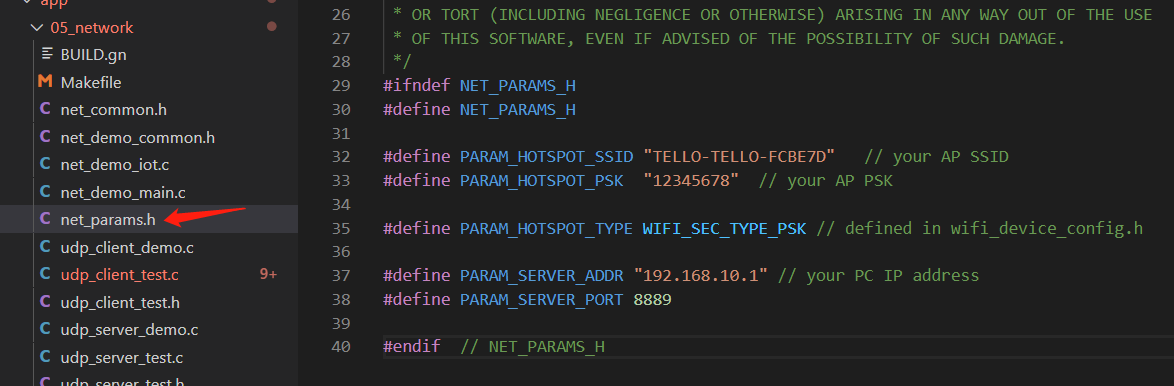
第二步:结合许老师的UDP网络编程–UDP demo 写入无人机的wifi名称,密码,ip地址,端口
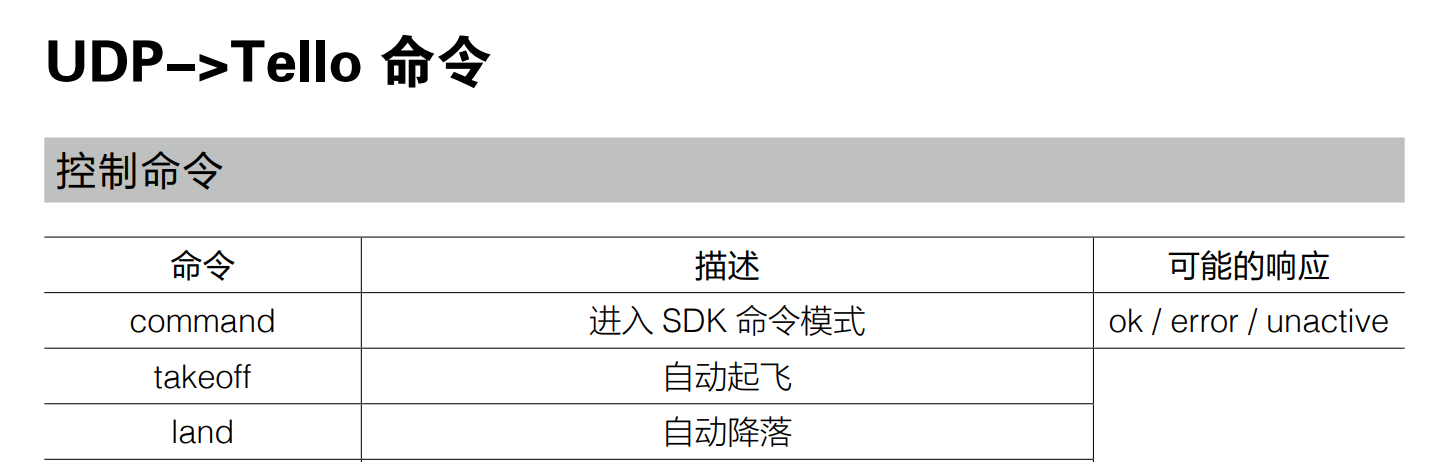
 第三步:查看无人机开放的SDK得知相关的命令
第三步:查看无人机开放的SDK得知相关的命令
SDK链接入下:
https://dl.djicdn.com/downloads/RoboMaster%20TT/Tello_SDK_3.0_User_Guide.pdf
 第四步:编写客户端代码
第四步:编写客户端代码

retval = sendto(sockfd, "command", sizeof("command"), 0, (struct sockaddr *)&toAddr, sizeof(toAddr));
printf("send UDP message {%s} %ld done!\r\n","command", retval);
osDelay(500);
retval = sendto(sockfd, "takeoff", sizeof("takeoff"), 0, (struct sockaddr *)&toAddr, sizeof(toAddr));
printf("send UDP message {%s} %ld done!\r\n","takeoff", retval);
osDelay(800);
retval = sendto(sockfd, "up 50", sizeof("up 50"), 0, (struct sockaddr *)&toAddr, sizeof(toAddr));
printf("send UDP message {%s} %ld done!\r\n","up 50", retval);
osDelay(500);
//部分指令由于这个无人机的服务端已经封装好的,在监听模式,所以只给他传输命令即可!
第五步:把两个BUILD.gn文件里面内容检测完毕,即可进入编译
看到BUILD SUCCESS,基本大工告成!
第六步:开机测试,附上串口打印的信息
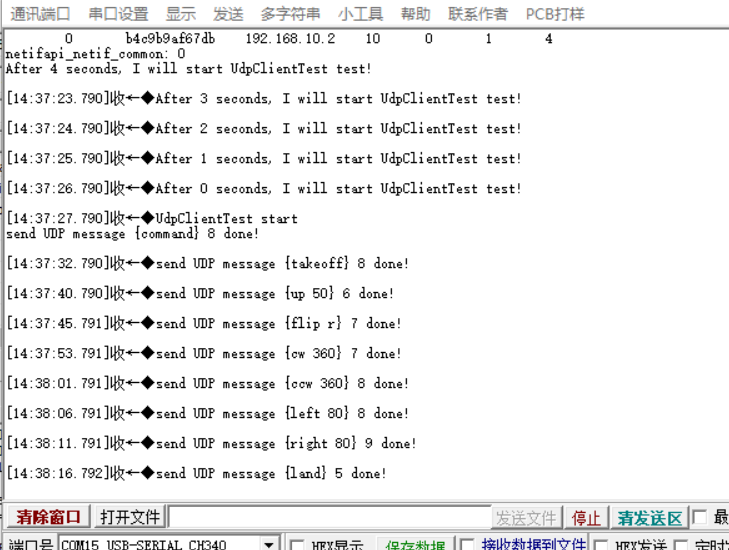
总体上还好,不过还存在指令在传输过程中丢失的情况,5个命令,有时候传过去了4个或者3个。
测试视频链接如下:
https://harmonyos.51cto.com/person/posts/14938621?tabIndex=2
© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END











暂无评论内容